

Mesurer la Distance pour Eviter les Collisions
Systèmes LiDAR pour détecter les obstacles
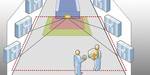
Pour que les véhicules et les aéronefs télépilotés puissent rouler ou voler de façon autonome, ils doivent être capables de détecter les obstacles pour les éviter. La surveillance de l’environnement via les systèmes LIDAR présente beaucoup d’avantages : ces systèmes sont non seulement bon marché, mais ils peuvent aussi mesurer des distances allant jusqu’à 100 mètres. LIDAR est l’acronyme de l‘expression en langue anglaise « Light Detection And Ranging » où détection et télémétrie par la lumière.
Pour effectuer des mesures, des diodes laser pulsées (PLD) sont utilisées comme émetteurs et des photodiodes à avalanche (APD) comme détecteurs ; ce principe de mesure est basé sur la mesure optique du temps de vol.
Mesure optique du temps de vol (ToF)
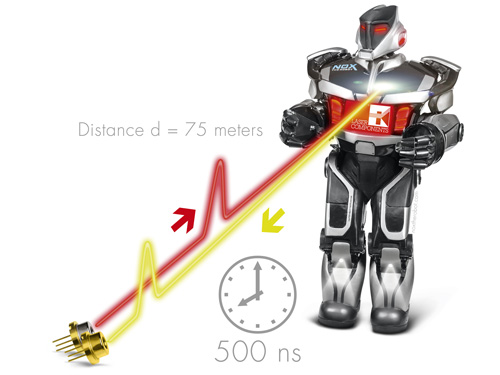
Le principe de la mesure optique du temps de vol (ToF - Time of Flight) est facile à expliquer : une PLD envoie une courte impulsion lumineuse ; idéalement, cette lumière se propage sans entrave dans l’air via la plus courte distance jusqu’à ce qu’elle détecte un obstacle. La lumière est alors réfléchie par l’obstacle et l’impulsion renvoyée est détectée par une APD. L’électronique qui relie les APD et les PLD mesure le temps ∆t entre l’impulsion lumineuse envoyée et renvoyée. Étant donné que la vitesse de propagation de la lumière est déjà connue, on peut facilement calculer la distance d d’un obstacle à partir du temps mesuré.
Principes physiques élémentaires
La lumière se propage dans le vide à la vitesse de la lumière c. Les mesures dans le vide donnent la valeur c suivante :
c = 299 792 458 mètres/seconde
En termes physiques, le vide est un espace sans matière ; ainsi, celui-ci a la densité optique n = 1. Les particules de poussière les plus fines trouvées dans l’air transforment la densité optique en ce qu’on appelle l’indice de réfraction n. La longueur d’onde et la vitesse de phase sont plus faibles que dans le vide ; ainsi, la vitesse de propagation de la lumière change aussi : cair = c/nair
Exemple de calcul
Imaginez pour un moment que l’impulsion lumineuse est détectée à ∆t = 500 ns. L’obstacle a une distance l et le temps mesuré désigne le va-et-vient (l’aller-retour) du trajet lumineux (i.e. ; 2*d).
On peut calculer de tête la distance si on utilise les valeurs approximatives suivantes :
c = 300 000 000 m/s = 3*108 m/s
n = 1
L’équation suivante est appliquée :
∆t = 2*l*n/c = 500 ns = 5*10 –7 s
d = 0.5 * (c * ∆t) / n
The distance can be calculated as:
d = 0.5* (3*108 m/s * 5*10 –7 s)/1
d = 0.5*3*5*101 m
= 75 m
Il est impressionant de réaliser l’ultra petite durée des intervalles nécessaires pour mesurer les courtes distances ; ces intervalles s’étendent dans la gamme des picosecondes qui correspond à la trillionième partie d’une seconde.
Conduite autonome
L’étude « Automotive LiDAR Market for ADAS and Automated Driving, Global 2016 » (Le marché automobile : LIDAR pour ADAS et la conduite autonome, Global 2016) publiée par Frost & Sullivan prévoit l’essor des technologies LIDAR liées à la conduite autonome. Les domaines d’application sont divers allant des systèmes de détection de dérive de la trajectoire jusqu’aux fonctions autopilote. Leur utilisation en masse est prévue d’ici 2025.
Source: frost.com/mb5c
Further product information:
Photodiodes à Avalanche
Diodes Laser Pulsées